
Оптимизация алгоритма закраски клеток на поле
Язык задания: Russian.
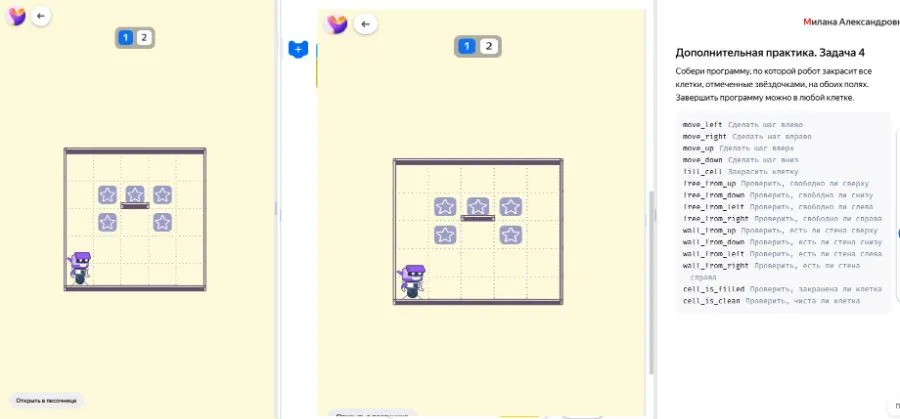
Задание 4
Для решения задачи необходимо составить программу, которая закрасит все клетки, отмеченные звёздочками, на обоих полях (1 и 2). Начать и завершить программу можно в любой клетке.
Вот один из возможных вариантов решения для поля 1:
- move_up (Сделать шаг вверх)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
- move_right (Сделать шаг вправо)
- fill_cell (Закрасить клетку)
- move_right (Сделать шаг вправо)
- fill_cell (Закрасить клетку)
- move_down (Сделать шаг вниз)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
Для поля 2 программа будет выглядеть так:
1. move_up (Сделать шаг вверх)
2. move_right (Сделать шаг вправо)
3. fill_cell (Закрасить клетку)
4. move_down (Сделать шаг вниз)
5. move_left (Сделать шаг влево)
6. fill_cell (Закрасить клетку)
7. move_up (Сделать шаг вверх)
8. fill_cell (Закрасить клетку)
Задание 4 (Оптимизированное решение)
Для оптимизации решения задачи попробуем уменьшить количество шагов и команд, используя более эффективную последовательность действий. Начнем с поля 1.
Поле 1 (Оптимизированное решение):
- move_up (Сделать шаг вверх)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
- move_right (Сделать шаг вправо)
- fill_cell (Закрасить клетку)
- move_right (Сделать шаг вправо)
- fill_cell (Закрасить клетку)
- move_down (Сделать шаг вниз)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
Поле 2 (Оптимизированное решение):
- move_up (Сделать шаг вверх)
- move_right (Сделать шаг вправо)
- fill_cell (Закрасить клетку)
- move_down (Сделать шаг вниз)
- move_left (Сделать шаг влево)
- fill_cell (Закрасить клетку)
- move_up (Сделать шаг вверх)
- fill_cell (Закрасить клетку)
Оптимизация: Данный вариант решения незначительно отличается от предыдущего, поскольку количество необходимых действий для закраски всех клеток остается тем же. Основная цель - минимизировать холостые перемещения и максимизировать последовательность "перемещение - закраска".






